







Lecture différée de la webcam d'un Raspberry Pi
L’objectif de ce billet est de parvenir à lire le flux provenant de la
caméra d’un Raspberry Pi avec un décalage de quelques secondes (plutôt
qu’en direct), avec les outils dédiés que sont raspivid et omxplayer.
Contexte
Là où je travaille, il y a un babyfoot. Nous avons récemment décidé de l’informatiser un peu pour avoir la détection et le ralenti des buts. Entre autres, un Raspberry Pi a été installé avec sa caméra au-dessus du terrain de manière à fournir une vue aérienne.
raspivid permet d’afficher en direct ce que la caméra filme. Mais l’intérêt
est faible dans notre cas : le direct, nous l’avons déjà sous les yeux.
Il est bien plus utile d’avoir un “direct” différé de quelques secondes : lors d’un but ou d’une action litigieuse, il suffit de tourner la tête pour revoir ce qu’il vient de se passer (à vitesse réelle).
Je me suis intéressé à faire fonctionner ce cas d’usage. Je vais détailler ici les principes et les problèmes rencontrés.
Un simple tube
La première idée fut de brancher le flux H.264 que produit raspivid sur
l’entrée de omxplayer, qui serait démarré quelques secondes plus tard.
Premier problème, omxplayer ne semblait pas savoir lire sur son entrée
standard. Ce n’est pas très gênant, il suffit d’utiliser un tube nommé grâce à
mkfifo. En effet :
printf 'a\\nb\\nc\\n' | grep bpeut être remplacé par :
# terminal 1
mkfifo /tmp/fifo
printf 'a\\nb\\nc\\n' > /tmp/fifo
# terminal 2
< /tmp/fifo grep bMais en fait, il y a plus direct : omxplayer n’est qu’un script wrapper pour
le vrai omxplayer.bin, c’est lui qui empêchait la lecture sur l’entrée
standard. Il suffit juste d’exporter la variable qui-va-bien et d’appeler
omxplayer.bin directement :
export LD_LIBRARY_PATH="/opt/vc/lib:/usr/lib/omxplayer"
omxplayer.bin …Cependant, contrairement à ce que proposent beaucoup de commandes shell,
omxplayer.bin ne prévoit pas explicitement de lire sur son entrée standard, il
attend obligatoirement un fichier en paramètre. Donnons-lui donc comme fichier
/dev/stdin !
raspivid -t 0 -w 1280 -h 720 -fps 25 -n -o - | omxplayer.bin /dev/stdinVu la durée de démarrage d’omxplayer.bin, pas besoin de retarder son
lancement, la vidéo sera bien décalée de quelques secondes.
Le problème, c’est que le buffer lié au tube est très limité (man 7 pipe) :
il sera très vite plein, bloquant totalement l’enregistrement et la lecture de
la vidéo.
Avec un buffer
Nous avons besoin d’un buffer plus important. Pour cela, nous pouvons utiliser
mbuffer, ici avec une taille de 10Mo :
raspivid … | mbuffer -m 10m | omxplayer.bin /dev/stdinEt là, cela semble fonctionner.
Pour décaler un peu plus la lecture par omxplayer.bin, il est possible
d’utiliser les commandes groupées (man bash) pour ajouter un appel à sleep
avant le démarrage :
raspivid … | mbuffer -m 10m | { sleep 3; omxplayer.bin /dev/stdin; }raspivid est censé enregistrer à 25 fps (-fps 25) et omxplayer nous
indique dans la console qu’il lit à 25 fps.
Cependant, en réalité, le décalage n’est pas constant : il augmente petit à petit au fil des minutes, et le buffer se remplit légèrement plus vite qu’il ne se vide. La lecture consomme moins d’images que n’en produit l’enregistrement, comme si le débit d’images de l’enregistrement était supérieur à celui de lecture.
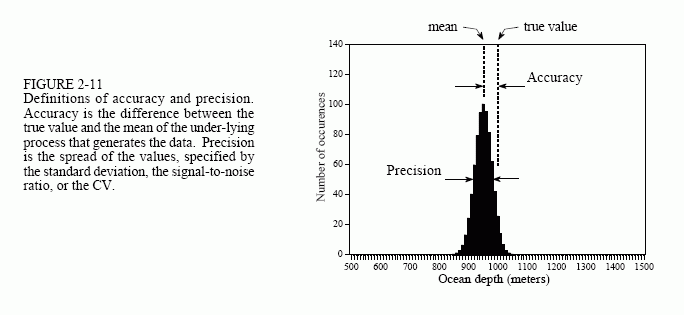
Il y a donc un manque d’exactitude (à ne pas confondre avec un manque de précision) dans le nombre d’images enregistrées et/ou lues par seconde.
Si nous tentons d’enregistrer à un débit légèrement inférieur (24 fps), c’est le contraire : le retard est rattrapé progressivement jusqu’à fournir une lecture en direct.
Comme le débit d’images est la seule information temporelle disponible et qu’elle est inexacte, il semble impossible de contrecarrer cette variation de délai.
Information temporelle
Mais en réalité, ce n’est pas la seule information temporelle dont nous disposons : nous savons que le flux est en direct.
Comment exploiter cette information ? Pour le comprendre, il suffit
d’enregistrer à un débit d’images très faible (-fps 5) et de le lire toujours
à 25 fps.
Si la lecture provient d’un fichier, alors la vidéo passe en accéléré. Par contre, si la lecture sort de la webcam en direct, alors la vidéo passe à vitesse normale mais à 5 fps : le lecteur a beau vouloir lire 25 images par seconde, s’il n’en reçoit que 5 chaque seconde, il n’a pas d’autre choix que de lire à 5 fps.
Ainsi, sans même connaître sa valeur réelle exacte, nous parvenons à obtenir le même débit d’images à l’enregistrement qu’à la lecture.
Mais comme nous l’avons vu, avec un débit d’images d’enregistrement inférieur, le délai introduit se réduira inexorablement (le retard sera rattrapé). Ce que nous voulons éviter : nous voulons un délai constant.
Delay
Nous avons cependant avancé, car maintenant, si nous disposions d’une commande
qui retarde ce qui sort de raspivid pour le donner à omxplayer x secondes
plus tard, et que nous enregistrons à un débit d’images légèrement inférieur à
celui de la lecture, alors omxplayer rattrapera le retard pour parvenir au
direct… décalé de x secondes. Exactement ce que nous voulons !
J’ai donc demandé sur stackoverflow si une telle commande existait, ce qui ne semblait pas être le cas.
Je l’ai donc implémentée (sous licence GPLv3) :
git clone http://git.rom1v.com/delay.git
cd delay
make && sudo make install(ou sur github)
Elle permet de décaler tout ce qui arrive sur stdin d’un délai constant pour
le sortir sur stdout :
delay [-b <dtbufsize>] <delay>
Elle est donc très générique, et n’a aucun lien avec le fait que le flux soit une vidéo.
Elle fonctionne aussi très bien pour différer la lecture de la webcam dans VLC sur un pc classique :
ffmpeg -an -s 320x240 -f video4linux2 -i /dev/video0 -f mpeg2video -b 1M - |
delay 2s | vlc -Nous pourrions penser qu’il suffit de faire la même chose avec raspivid et
omxplayer, avec un débit d’images légèrement inférieur pour l’enregistrement
(24 fps) :
raspivid -t 0 -w 1280 -h 720 -fps 24 -n -o - |
delay -b10m 4s |
omxplayer.bin /dev/stdinMalheureusement, avec omxplayer, ce n’est pas si simple.
Initialisation immédiate
En effet, l’initialisation d’omxplayer pour une lecture vidéo est très longue
(plusieurs secondes), et surtout, elle ne débute que lorsque une partie
suffisamment importante de la vidéo à lire est reçue (les headers ne suffisent
pas). Décaler la vidéo de x secondes décale également l’initialisation de x
secondes, ajoutant d’autant plus de décalage.
Certes, le retard supplémentaire sera rattrapé progressivement, mais cela prendra du temps (environ 1 image chaque seconde, soit 1 seconde toutes les 25 secondes). Pour obtenir le délai désiré dès le départ, ce problème doit être évité.
Une solution de contournement consiste à passer les premiers (méga-)octets
sortis de raspivid directement à omxplayer.bin, et de ne différer que le
reste avec delay. De cette manière, les premières images seront lues
immédiatement, permettant au lecteur de s’initialiser, alors que la suite sera
différée.
Grâce aux commandes groupées de bash (encore elles), c’est très simple :
raspivid -t 0 -w 1280 -h 720 -fps 24 -n -o - |
{ head -c10M; delay -b10m 4s; } |
omxplayer.bin /dev/stdinLa commande head va passer immédiatement les 10 premiers méga-octets à
omxplayer.bin, puis la commande delay prendra le relai. Ainsi,
l’initialisation aura déjà eu lieu quand les premiers octets sortiront de
delay.
À part les premières secondes un peu chaotiques, le flux vidéo sera alors bien diffusé en différé avec un délai constant (testé sur 24 heures).
Conclusion
Nous avons donc bricolé une solution qui permet un replay différé en continu sur un Raspberry Pi.

